Josh,
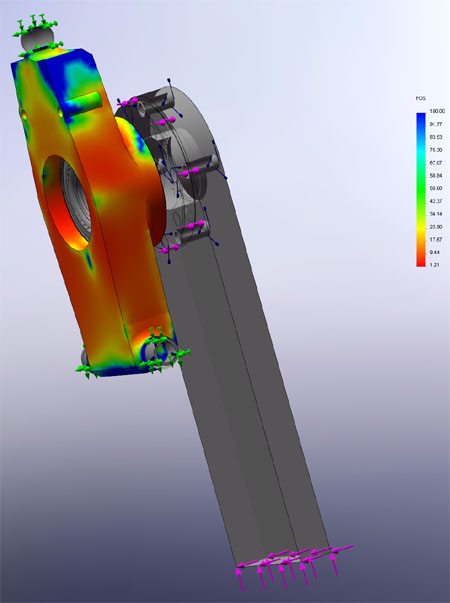
I think the loads will be applied to half of circumference in case of (Fx and Fz).
Fy will be transmitted from the bearing to the bearing shoulder on the upright
http://help.solidworks.com/2015/engl...stribution.htm
Someone correct me if I'am wrong.
 |

|
 Reply With Quote
Reply With Quote